LuisaCompute is a high-performance cross-platform computing framework for graphics and beyond.
LuisaCompute is also the rendering framework described in the SIGGRAPH Asia 2022 paper
LuisaRender: A High-Performance Rendering Framework with Layered and Unified Interfaces on Stream Architectures.
See also LuisaRender for the rendering application as described in the paper; and please visit the project page for other information about the paper and the project.
Welcome to join the discussion channel on Discord!
对于中国大陆的用户,也欢迎加入我们的 QQ 群组:295618382。
Table of Contents
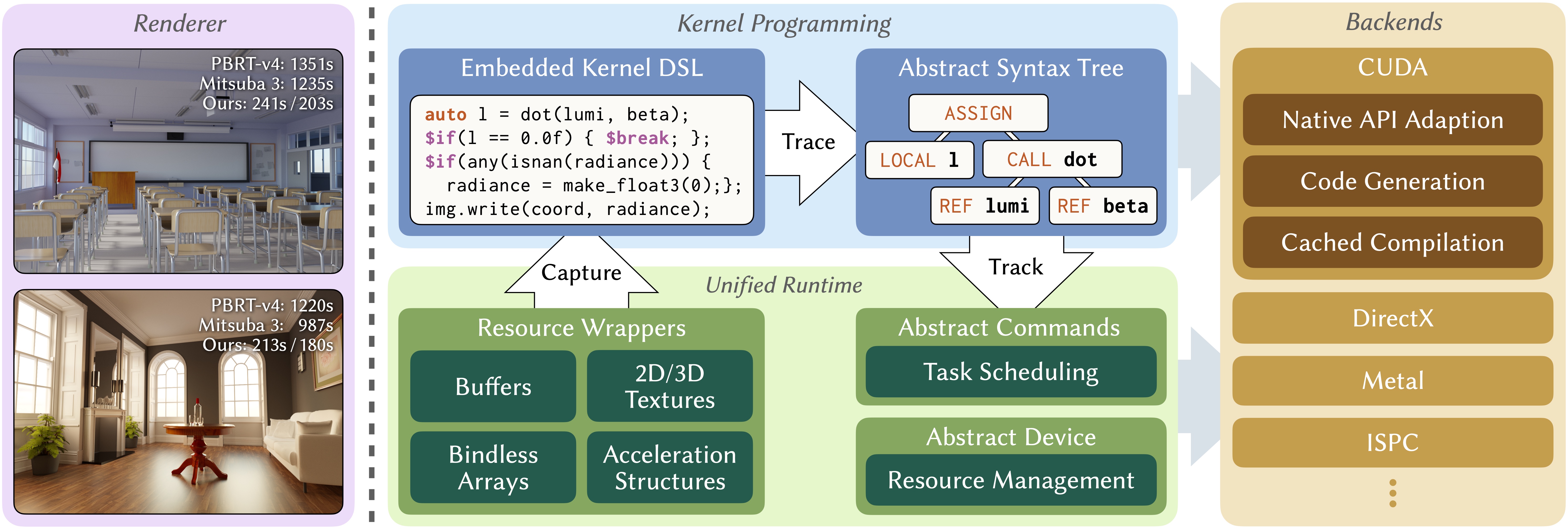
Overview
LuisaCompute seeks to balance the seemingly ever-conflicting pursuits for unification, programmability, and performance. To achieve this goal, we design three major components:
- A domain-specific language (DSL) embedded inside modern C++ for kernel programming exploiting JIT code generation and compilation;
- A unified runtime with resource wrappers for cross-platform resource management and command scheduling; and
- Multiple optimized backends, including CUDA, DirectX, Metal, and CPU.
To demonstrate the practicality of the system, we also build a Monte Carlo renderer, LuisaRender, atop the framework, which is faster than the state-of-the-art rendering frameworks on modern GPUs.
Embedded Domain-Specific Language
The DSL in our system provides a unified approach to authoring kernels, i.e., programmable computation tasks on the device. Distinct from typical graphics APIs that use standalone shading languages for device code, our system unifies the authoring of both the host-side logic and device-side kernels into the same language, i.e., modern C++.
The implementation purely relies on the C++ language itself, without any custom preprocessing pass or compiler extension. We exploit meta-programming techniques to simulate the syntax, and function/operator overloading to dynamically trace the user-defined kernels. ASTs are constructed during the tracing as an intermediate representation and later handed over to the backends for generating concrete, platform-dependent shader source code.
Example program in the embedded DSL:
Callable to_srgb = [](Float3 x) {
$if (x <= 0.00031308f) {
x = 12.92f * x;
} $else {
x = 1.055f * pow(x, 1.f / 2.4f) - .055f;
};
return x;
};
Kernel2D fill = [&](ImageFloat image) {
auto coord = dispatch_id().xy();
auto size = make_float2(dispatch_size().xy());
auto rg = make_float2(coord) / size;
// invoke the callable
auto srgb = to_srgb(make_float3(rg, 1.f));
image.write(coord, make_float4(srgb, 1.f));
};
Unified Runtime with Resource Wrappers
Like the RHIs in game engines, we introduce an abstract runtime layer to re-unify the fragmented graphics APIs across platforms. It extracts the common concepts and constructs shared by the backend APIs and plays the bridging role between the high-level frontend interfaces and the low-level backend implementations.
On the programming interfaces for users, we provide high-level resource wrappers to ease programming and eliminate boilerplate code. They are strongly and statically typed modern C++ objects, which not only simplify the generation of commands via convenient member methods but also support close interaction with the DSL. Moreover, with the resource usage information in kernels and commands, the runtime automatically probes the dependencies between commands and re-schedules them to improve hardware utilization.
Multiple Backends
The backends are the final realizers of computation. They generate concrete shader sources from the ASTs and compile them into native shaders. They implement the virtual device interfaces with low-level platform-dependent API calls and translate the intermediate command representations into native kernel launches and command dispatches.
Currently, we have 3 working GPU backends for the C++ and Python frontends, based on CUDA, Metal, and DirectX, respectively, and a CPU backend (re-)implemented in Rust for debugging purpose and fallback.
Python Frontend
Besides the native C++ DSL and runtime interfaces, we are also working on a Python frontend and have published early-access packages to PyPI. You may install the pre-built wheels with pip (Python >= 3.10 required):
python -m pip install luisa-python
You may also build your own wheels with pip:
python -m pip wheel <path-to-project> -w <output-dir>
Examples using the Python frontend can be found under src/tests/python.
Note: Due to the different syntax and idioms between Python and C++, the Python frontend does not 1:1 reflects the C++ DSL and APIs. For instance, Python does not have a dedicated reference type qualifier, so we follow the Python idiom that structures and arrays are passed as references to
@luisa.funcand built-in types (scalar, vector, matrix, etc.) as values by default.
C API and Frontends in Other Languages
We are also making a C API for creating other language bindings and frontends (e.g., in Rust and C#).
Building
Note: LuisaCompute is a rendering framework rather than a renderer itself. It is designed to provide general computation functionalities on modern stream-processing hardware, on which high-performance, cross-platform graphics applications can be easily built. If you would like to just try a Monte Carlo renderer out of the box rather than building one from scratch, please see LuisaRender.
Preparation
-
Check your hardware and platform. Currently, we support CUDA on Linux and Windows; DirectX on Windows; Metal on macOS; and CPU on all the major platforms. For CUDA, an RTX-enabled graphics card, e.g., NVIDIA RTX 20 and 30 series, is required. For DirectX, a DirectX-12.1 & Shader Model 6.5 compatible graphics card is required.
-
Prepare the environment and dependencies. We recommend using the latest IDEs, Compilers, XMake/CMake, CUDA drivers, etc. Since we aggressively use new technologies like C++20 and OptiX 8, you may need to, for example, upgrade your VS to 2019 or 2022 and install CUDA 11.7+ and NVIDIA driver R535+.
-
Clone the repo with the
--recursiveoption:git clone -b next https://github.com/LuisaGroup/LuisaCompute.git/ --recursive
Since we use Git submodules to manage third-party dependencies, a
--recursiveclone is required. -
Detailed requirements for each platform are listed in BUILD.md.
Build via the Bootstrap Script
The easiest way to build LuisaCompute is to use the bootstrap script. It can even download and install the required dependencies and build the project.
python bootstrap.py cmake -f cuda -b # build with CUDA backend using CMake
python bootstrap.py cmake -f cuda -b -- -DCMAKE_BUILD_TYPE=RelWithDebInfo # everything after -- will be passed to CMake
You may specify -f all to enable all available features on your platform.
To install certain dependencies, you can use the --install or -i option. For example, to install Rust, you can use:
python bootstrap.py -i rust
Alternatively, the bootstrap script can output a configuration file for build system without actually building the project. This is useful when you want to use the project inside IDE.
python bootstrap.py cmake -f cuda -c -o cmake-build-release # generate CMake configuration in ./cmake-build-release
Please use python bootstrap.py --help for more details.
Build from Source with XMake/CMake
LuisaCompute follows the standard XMake and CMake build process. Please see also BUILD.md for details on platform requirements, configuration options, and other precautions.
Usage
A Minimal Example
Using LuisaCompute to construct a graphics application basically involves the following steps:
- Create a
Contextand loading aDeviceplug-in; - Create a
Streamfor command submission and other device resources (e.g.,Buffer<T>s for linear storage,Image<T>s for 2D readable/writable textures, andMeshes andAccels for ray-scene intersection testing structures) viaDevice‘screate_*interfaces; - Author
Kernels to describe the on-device computation tasks, and compile them intoShaders viaDevice‘scompileinterface; - Generate
Commands via each resource’s interface (e.g.,Buffer<T>::copy_to), orShader‘soperator()anddispatch, and submit them to the stream; - Wait for the results by inserting a
synchronizephoney command to theStream.
Putting the above together, a minimal example program that write gradient color to an image would look like
#include <luisa-compute.h>
// For the DSL sugar macros like $if.
// We exclude this header from <luisa-compute.h> to avoid pollution.
// So you have to include it explicitly to use the sugar macros.
#include <dsl/sugar.h>
using namespace luisa;
using namespace luisa::compute;
int main(int argc, char *argv[]) {
// Step 1.1: Create a context
Context context{argv[0]};
// Step 1.2: Load the CUDA backend plug-in and create a device
Device device = context.create_device("cuda");
// Step 2.1: Create a stream for command submission
Stream stream = device.create_stream();
// Step 2.2: Create an 1024x1024 image with 4-channel 8-bit storage for each pixel; the template
// argument `float` indicates that pixel values reading from or writing to the image
// are converted from `byte4` to `float4` or `float4` to `byte4` automatically
Image<float> device_image = device.create_image<float>(PixelStorage::BYTE4, 1024u, 1024u, 0u);
// Step 3.1: Define kernels to describe the device-side computation
//
// A `Callable` is a function *entity* (not directly inlined during
// the AST recording) that is invocable from kernels or other callables
Callable linear_to_srgb = [](Float4 /* alias for Var<float4> */ linear) noexcept {
// The DSL syntax is much like the original C++
auto x = linear.xyz();
return make_float4(
select(1.055f * pow(x, 1.0f / 2.4f) - 0.055f,
12.92f * x,
x <= 0.00031308f),
linear.w);
};
// A `Kernel` is an *entry* function to the device workload
Kernel2D fill_image_kernel = [&linear_to_srgb](ImageFloat /* alias for Var<Image<float>> */ image) noexcept {
Var coord = dispatch_id().xy();
Var rg = make_float2(coord) / make_float2(dispatch_size().xy());
image->write(coord, linear_to_srgb(make_float4(rg, 1.0f, 1.0f)));
};
// Step 3.2: Compile the kernel into a shader (i.e., a runnable object on the device)
auto fill_image = device.compile(fill_image_kernel);
// Prepare the host memory for holding the image
std::vector<std::byte> download_image(1024u * 1024u * 4u);
// Step 4: Generate commands from resources and shaders, and
// submit them to the stream to execute on the device
stream << fill_image(device_image.view(0)).dispatch(1024u, 1024u)
<< device_image.copy_to(download_image.data())
<< synchronize();// Step 5: Synchronize the stream
// Now, you have the device-computed pixels in the host memory!
your_image_save_function("color.png", downloaded_image, 1024u, 1024u, 4u);
}
Basic Types
In addition to standard C++ scalar types (e.g., int, uint — alias of uint32_t, float, and bool), LuisaCompute provides vector/matrix types for 3D graphics, including the following types:
// boolean vectors
using bool2 = Vector<bool, 2>; // alignment: 2B
using bool3 = Vector<bool, 3>; // alignment: 4B
using bool4 = Vector<bool, 4>; // alignment: 4B
// signed and unsigned integer vectors
using int2 = Vector<int, 2>; // alignment: 8B
using int3 = Vector<int, 3>; // alignment: 16B
using int4 = Vector<int, 4>; // alignment: 16B
using uint2 = Vector<uint, 2>; // alignment: 8B
using uint3 = Vector<uint, 3>; // alignment: 16B
using uint4 = Vector<uint, 4>; // alignment: 16B
// floating-point vectors and matrices
using float2 = Vector<float, 2>; // alignment: 8B
using float3 = Vector<float, 3>; // alignment: 16B
using float4 = Vector<float, 4>; // alignment: 16B
using float2x2 = Matrix<2>; // column-major, alignment: 8B
using float3x3 = Matrix<3>; // column-major, alignment: 16B
using float4x4 = Matrix<4>; // column-major, alignment: 16B
⚠️ Please pay attention to the alignment of 3D vectors and matrices — they are aligned like 4D ones rather than packed. Also, we do not provide 64-bit integer or floating-point vector/matrix types, as they are less useful and typically unsupported on GPUs.
To make vectors/matrices, we provide make_* and read-only swizzle interfaces, e.g.,
auto a = make_float2(); // (0.f, 0.f)
auto b = make_int3(1); // (1, 1, 1)
auto c = make_uint3(b); // (1u, 1u, 1u): converts from a same-dimentional but (possibly) differently typed vector
auto d = make_float3(a, 1.f); // (0.f, 0.f, 1.f): construct float3 from float2 and a float scalar
auto e = d.zzxy(); // (1.f, 1.f, 0.f, 0.f): swizzle
auto m = make_float2x2(1.f); // ((1.f, 0.f,), (0.f, 1.f)): diagonal matrix from a scalar
...
Operators are also overloaded for scalar-vector, vector-vector, scalar-matrix, vector-matrix, and matrix-matrix calculations, e.g.,
auto one = make_float2(1.f); // (1.f, 1.f)
auto two = 2.f;
auto three = one + two; // (3.f, 3.f), scalar broadcast to vector
auto m2 = make_float2(2.f); // ((2.f, 0.f), (0.f, 2.f))
auto m3 = 1.5f * m2; // ((3.f, 0.f), (0.f, 3.f)), scalar-matrix multiplication
auto v = m3 * one; // (3.f, 3.f), matrix-vector multiplication, the vector should always
// appear at the right-hand side and is interpreted as a column vector
auto m6 = m2 * m3; // ((6.f, 0.f), (0.f, 6.f)), matrix-matrix multiplication
The scalar, vector, matrix, and array types are also supported in the DSL, together with make_*, swizzles, and operators. Just wrap them in the Var<T> template or use the pre-defined aliases:
// scalar types; note that 64-bit ones are not supported
using Int = Var<int>;
using UInt = Var<uint>;
using Float = Var<float>;
using Bool = Var<bool>;
// vector types
using Int2 = Var<int2>; // = Var<Vector<int, 2>>
using Int3 = Var<int3>; // = Var<Vector<int, 3>>
/* ... */
// matrix types
using Float2x2 = Var<float2x2>; // = Var<Matrix<2>>
using Float3x3 = Var<float3x3>; // = Var<Matrix<3>>
using Float4x4 = Var<float4x4>; // = Var<Matrix<4>>
// array types
template<typename T, size_t N>
using ArrayVar = Var<std::array<T, N>>;
// make_*
auto a = make_float2(one); // Float2(1.f, 1.f), suppose one = Float(1.f)
auto m = make_float2x2(a, a); // Float2x2((1.f, 1.f), (1.f, 1.f))
auto c = make_int2(a); // Int2(1, 1)
auto d = c.xxx(); // Int3(1, 1, 1)
auto e = d[0]; // 1
/* ... */
// operators
auto v2 = a * 2.f; // Float2(2.f, 2.f)
auto eq = v2 == v2; // Bool2(true, true)
/* ... */
⚠️ The only exception is that we disable
operator&&andoperator||in the DSL for scalars. This is because the DSL does not support the short-circuit semantics. We disable them to avoid ambiguity. Please useoperator&andoperator|instead, which have the consistent non-short-circuit semantics on both the host and device sides.
Besides the Var<T> template, there’s also an Expr<T>, which is to Var<T> what const T & is to T on the host side. In other words, Expr<T> stands for a const DSL variable reference, which does not create variables copies when passed around. However, note that the parameters of Callable/Kernel definition functions may only be Var<T>. This restriction might be removed in the future.
To conveniently convert a C++ variable to the DSL, we provide a helper template function def<T>:
auto a = def(1.f); // equivalent to auto a = def<float>(1.f);
auto b_host = make_float2(1.f); // host C++ variable float2(1.f, 1.f)
auto b_device = def(b_host); // device DSL variable Float2(1.f, 1.f)
/* ... */
Structures
To export a C++ data struct to the DSL, we provide a helper macro LUISA_STRUCT, which (semi-)automatically reflects the member layouts of the input structure:
// A C++ data structure
namespace foo {
struct alignas(8) S {
float a;
int b;
};
}
// A reflected DSL structure
LUISA_STRUCT(foo::S, a, b) {
/* device-side member functions, e.g., */
[[nodiscard]] auto twice_a() const noexcept { return 2.f * a; }
};
⚠️ The
LUISA_STRUCTmay only be used in the global namespace. The C++ structure to be exported may only contain scalar, vector, matrix, array, and other already exported structure types. The alignment of the whole structure specified withalignaswill be reflected but must be under 16B; member alignments specified withalignasare not supported.
Built-in Functions
For the DSL, we provide a rich set of built-in functions, in the following categories
- Thread coordinate and launch configuration queries, including
block_id,thread_id,dispatch_size, anddispatch_id; - Mathematical routines, such as
max,abs,sin,pow, andsqrt; - Resource accessing and modification methods, such as texture sampling, buffer read/write, and ray intersection;
- Variable construction and type conversion, e.g., the aforementioned
make_*,cast<T>for static type casting, andas<T>for bitwise type casting; and - Optimization hints for backend compilers, which currently consist of
assumeandunreachable.
The mathematical functions basically mirrors GLSL. We are working on the documentations that will provide more descriptions on them.
Control Flows
The DSL in LuisaCompute supports device-side control flows. They are provided as special macros prefixed with $:
$if (cond) { /*...*/ };
$if (cond) { /*...*/ } $else { /*...*/ };
$if (cond) { /*...*/ } $elif (cond2) { /*...*/ };
$if (cond) { /*...*/ } $elif (cond2) { /*...*/ } $else { /*...*/ };
$while (cond) { /*...*/ };
$for (variable, n) { /*...*/ };
$for (variable, begin, end) { /*...*/ };
$for (variable, begin, end, step) { /*...*/ };
$loop { /*...*/ }; // infinite loop, unless $break'ed
$switch (variable) {
$case (value) { /*...*/ }; // no $break needed inside, as we automatically add one
$default { /*...*/ }; // no $break needed inside, as we automatically add one
};
$break;
$continue;
Note that users are still able to use the native C++ control flows, i.e., if, while, etc. without the $ prefix. In that case the native control flows acts like a meta-stage to the DSL that directly controls the generation of the callables/kernels. This can be a powerful means to achieve multi-stage programming patterns. Such usages can be found throughout LuisaRender. We will cover such usage in the tutorials in the future.
Callable and Kernels
LuisaCompute supports two categories of device functions: Kernels (Kernel1D, Kernel2D, or Kernel3D) and Callables. Kernels are entries to the parallelized computation tasks on the device (equivalent to CUDA’s __global__ functions). Callables are function objects invocable from kernels or other callables (i.e., like CUDA’s __device__ functions). Both kinds are template classes that are constructible from C++ functions or function objects including lambda expressions:
// Define a callable from a lambda expression
Callable add_one = [](Float x) { return x + 1.f; };
// A callable may invoke another callable
Callable add_two = [&add_one](Float x) {
add_one(add_one(x));
};
// A callable may use captured device resources or resources in the argument list
auto buffer = device.create_buffer<float>(...);
Callable copy = [&buffer](BufferFloat buffer2, UInt index) {
auto x = buffer.read(index); // use captured resource
buffer2.write(index, x); // use declared resource in the argument list
};
// Define a 1D kernel from a lambda expression
Kernel1D add_one_and_some = [&buffer, &add_one](Float some, BufferFloat out) {
auto index = dispatch_id().x; // query thread index in the whole grid with built-in dispatch_id()
auto x = buffer.read(index); // use resource through capturing
auto result = add_one(x) + some; // invoke a callable
out.write(index, result); // use resource in the argument list
};
⚠️ Note that parameters of the definition functions for callables and kernels must be
Var<T>orVar<T> &(or their aliases).
Kernels can be compiled into shaders by the device:
auto some_shader = device.compile(some_kernel);
⚠️ Note that the compilation blocks the calling thread. For large kernels this might take a considerably long time. You may accelerate the process by compiling multiple kernels concurrently, e.g., with thread pools.
Most backends support caching the compiled shaders to accelerate future compilations of the same shader. The cache files are at <build-folder>/bin/.cache.
Backends, Context, Devices and Resources
LuisaCompute currently supports these backends:
- CUDA
- DirectX
- Metal
- CPU (Clang + LLVM)
More backends might be added in the future. A device backend is implemented as a plug-in, which follows the lc-backend-<name> naming convention and is placed under <build-folder>/bin.
The Context object is responsible for loading and managing these plug-ins and creating/destroying devices. Users have to pass the executable path (typically, argv[0]) or the runtime directory to a context’s constructor (so that it’s able to locate the plug-ins), and pass the backend name to create the corresponding device object.
int main(int argc, char *argv[]) {
Context context{argv[0]};
Device device = context.create_device("cuda");
/* ... */
}
⚠️ Creating multiple devices inside the same application is allowed. However, the resources are not shared across devices. Visiting one device’s resources from another device’s commands/shaders would lead to undefined behaviors.
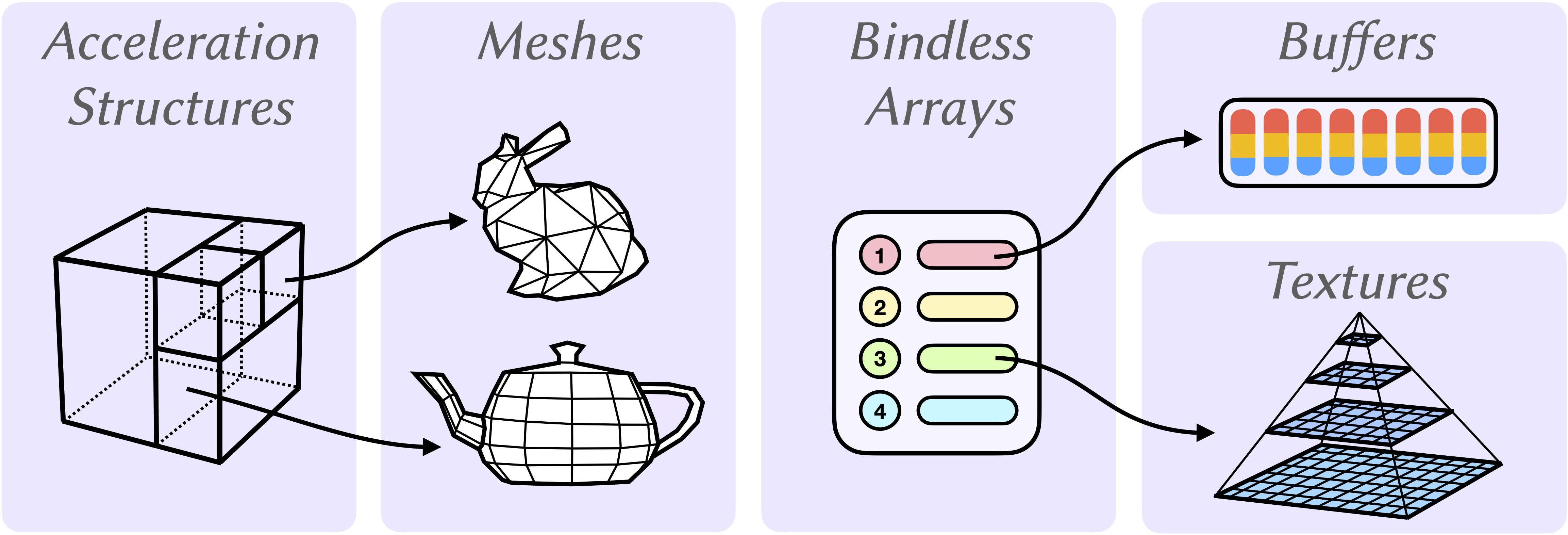
The device object provides methods for backend-specific operations, typicall, creating resources. LuisaCompute supports the following rousource types:
Buffer<T>s, which are linear memory ranges on the device for structured data storage;Image<T>s andVolume<T>s, which are 2D/3D textures of scalars or vectors readable and writable from the shader, possibly with hardware-accelerated caching and format conversion;BindlessArrays, which provide slots for references to buffers and textures (Images orVolumes bound with texture samplers, read-only in the shader), helpful for reducing the overhead and bypassing the limitations of binding shader parameters;Meshes andAccels (short for acceleration structures) for high-performance ray intersection tests, with hardware acceleration if available (e.g., on graphics cards that feature RT-Cores);
Devices are also responsible for
- Creating
Streams andEvents (the former are for command submission and the latter are for host-stream and stream-stream synchronization); and - Compiling kernels into shaders, as introduced before.
All resources, shaders, streams, and events are C++ objects with move contrutors/assignments and following the RAII idiom, i.e., automatically calling the Device::destroy_* interfaces when destructed.
⚠️ Users may need to pay attention not to dangle a resource, e.g., accidentally releases it before the dependent commands finish.
Command Submission and Synchronization
LuisaCompute adopts the explicit command-based execution model. Conceptually, commands are description units of atomic computation tasks, such as transferring data between the device and host, or from one resource to another; building meshes and acceleration structures; populating or updating bindless arrays; and most importantly, launching shaders.
Commands are organized into command buffers and then submitted to streams which are essentially queues forwarding commands to the backend devices in a logically first-in-first-out (FIFO) manner.
The resource wrappers provide convenient methods for creating commands, e.g.,
auto buffer_upload_command = buffer.copy_from(host_data)
auto accel_build_command = accel.build();
auto shader_dispatch_command = shader(args...).dispatch(n);
Command buffers are group commands that are submitted together:
auto command_buffer = stream.command_buffer();
command_buffer
<< raytrace_shader(framebuffer, accel, resolution)
.dispatch(resolution)
<< accumulate_shader(accum_image, framebuffer)
.dispatch(resolution)
<< hdr2ldr_shader(accum_image, ldr_image)
.dispatch(resolution)
<< ldr_image.copy_to(host_image.data())
<< commit(); // the commands are submitted to the stream together on commit()
For convenience, a stream implicitly creates a proxy object, which submit commands in the internal command buffer at the end of statements:
stream << buffer.copy_from(host_data) // a stream proxy is created on Stream::operator<<()
<< accel.build() // consecutive commands are stored in the implicit commad buffer in the proxy object
<< raytracing(image, accel, i)
.dispatch(width, height); // the proxy object automatically submits the commands at the end of the statement
⚠️ Since commands are asynchronously executed, users should pay attention to resource and host data lifetimes.
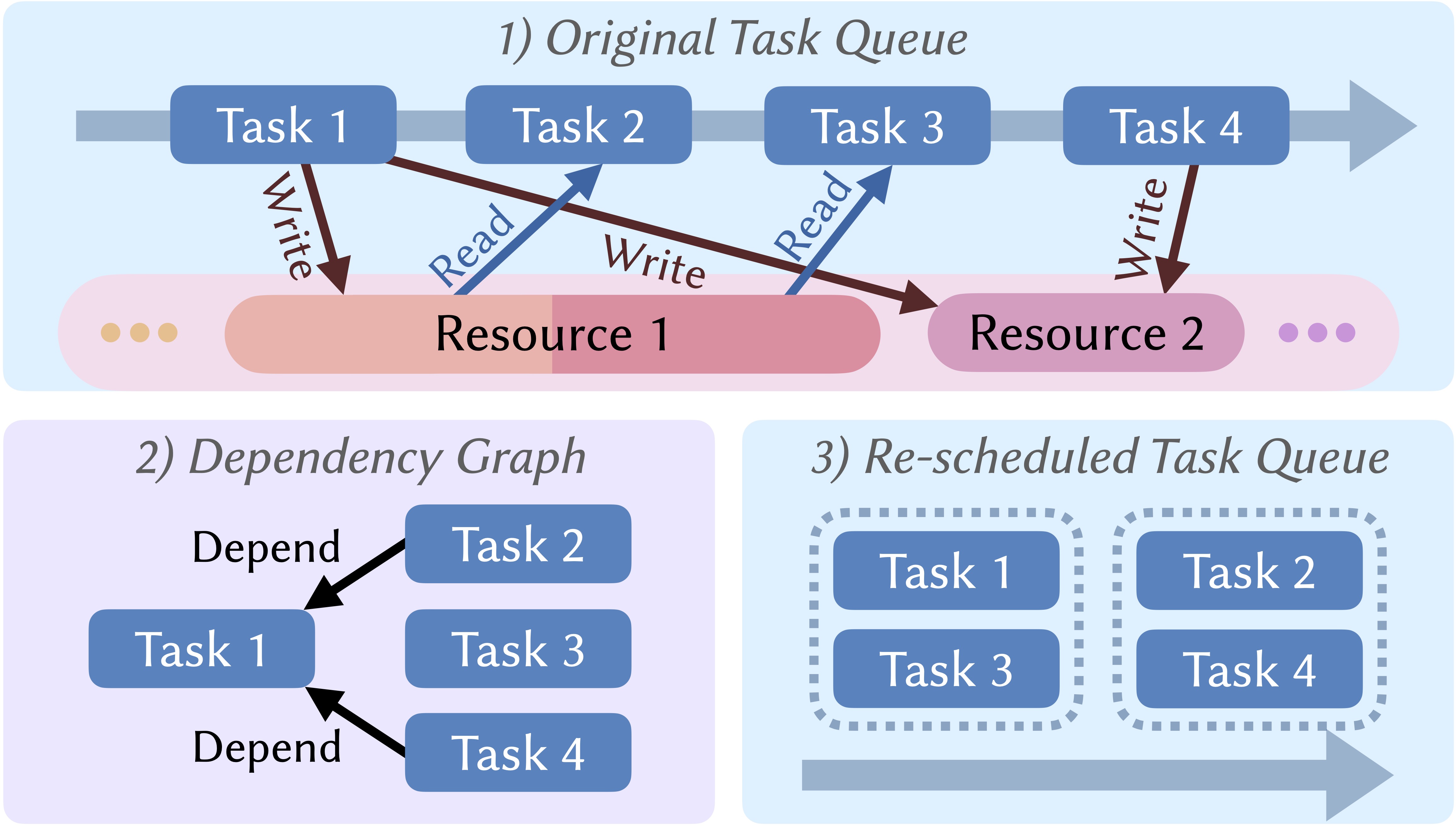
The backends in LuisaCompute can automatically determine the dependencies between the commands in a command buffer, and re-schedule them into an optimized order to improve hardware ultilization. Therefore, larger command buffers might be preferred for better computation throughput.
Multiple streams run concurrently. Therefore, users may require synchronizations between them or with respect to the host via Events, similar to condition variables that ensure ordering across threads:
auto event = device.create_event();
stream_a << command_a
<< event.signal(); // signals an event
stream_b << event.wait() // waits until the event signals
<< command_b; // will be executed after the event signals
<< event.signal(); // signals again
event.synchronize(); // blocks until the event signals
Automatic Differentiation
We implemented reverse mode autodiff using source-to-source transformation. The autodiff supports control flows such as if-else and switch, as well as callables. The following example shows how to use the autodiff to compute the gradient of a function f(t, x, y) = t < 1 ? x * y : x + y with respect to x and y:
Var<float> x = ...;
Var<float> y = ...;
Var<float> t = ...;
$autodiff {
requires_grad(x, y);
Var<float> z;
$if(t < 1.0) {
auto no_grad = some_non_differentiable_function(x, y);
z = x * y;
}$else {
z = callable(x, y);
};
backward(z);
dx->write(tid, grad(x));
dy->write(tid, grad(y));
};
Limitation (might be removed in the future):
- we don’t support loop with dynamic iteration count. To differentiate a loop, users have to unroll it by using
for(auto i = 0;i <count;i++) { dsl_body(i); }.
Applications
We implement several proof-of-concept examples in tree under src/tests (sorry for the misleading naming; they are also test programs we used during the development). Besides, you may also found the following applications interesting:
Documentation and Tutorials
Sorry that we are still working on them. Currently, we would recommand reading the original paper and learning through the examples and applications.
If you have any problem or suggestion, please just feel free to open an issue or start a discussion. We are very happy to hear from you!
Roadmap
See ROADMAP.md.
Citation
@article{Zheng2022LuisaRender,
author = {Zheng, Shaokun and Zhou, Zhiqian and Chen, Xin and Yan, Difei and Zhang, Chuyan and Geng, Yuefeng and Gu, Yan and Xu, Kun},
title = {LuisaRender: A High-Performance Rendering Framework with Layered and Unified Interfaces on Stream Architectures},
year = {2022},
issue_date = {December 2022},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {41},
number = {6},
issn = {0730-0301},
url = {https://doi.org/10.1145/3550454.3555463},
doi = {10.1145/3550454.3555463},
journal = {ACM Trans. Graph.},
month = {nov},
articleno = {232},
numpages = {19},
keywords = {stream architecture, rendering framework, cross-platform renderer}
}
The publisher version of the paper is open-access. You may download it for free.



